DataMesh bringt verkörperte KI-Datenproduktlösung auf den Markt – DataMesh Robotics
Die Lösung basiert auf einem „ausführbaren industriellen digitalen Zwilling“ und bietet dynamische Geschäftssimulation, industrielle Szenenmodellierung, Physik- und Sensorsimulation, fotorealistische synthetische Datengenerierung und automatisierte Ground-Truth-Kennzeichnung sowie praktische Methoden zur Definition industrieller Aufgabenziele
Das Training verkörperte KI mit einem „ausführbaren industriellen digitalen Zwilling“: dynamische Geschäftssimulation + synthetische Daten auf Industrieniveau + Belohnungskonfiguration
15. Januar 2026 – DataMesh gab heute die Einführung von DataMesh Robotics bekannt, einer verkörperten KI-Datenproduktlösung. Die Lösung konzentriert sich auf Industrie- und Anlagenszenarien und bietet Roboter-OEMs und Robotik-Anwendungsteams ein umfassendes Leistungsspektrum, das die Modellierung industrieller Szenen, physikalische Eigenschaften und Sensorsimulation, fotorealistische visuelle Generierung und skalierbare automatisierte Ground-Truth-Kennzeichnung umfasst. Es liefert außerdem praktische Methoden und Bereitstellungsspezifikationen für eine der schwierigsten Herausforderungen im verkörperten KI-Training: die Definition und Konfiguration von Aufgabenzielen und Belohnungssignalen für industrielle Aufgaben.
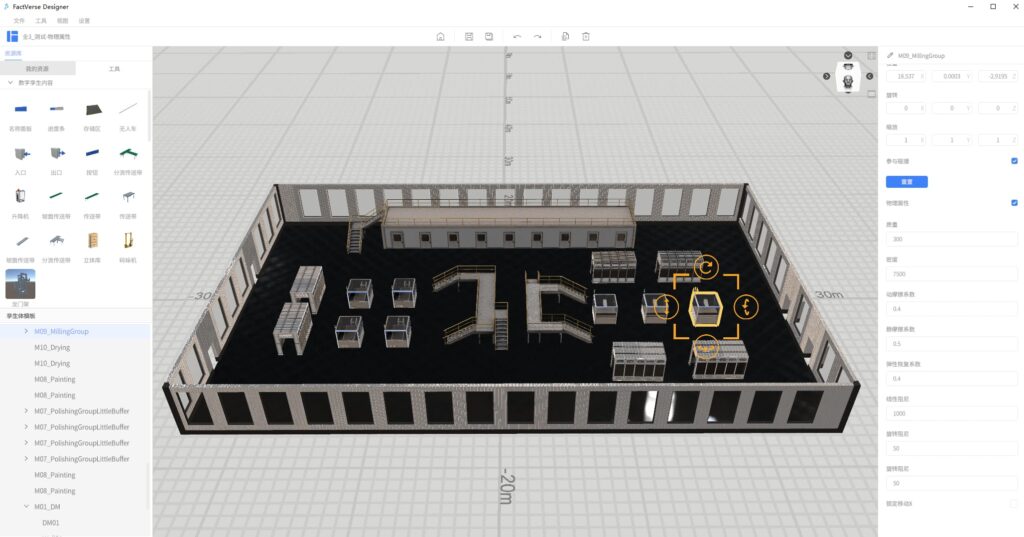
Im Gegensatz zu vielen „Digital Twin“-Angeboten auf dem Markt, die auf dem Niveau statischer 3D-Visualisierung und Datenüberlagerungen bleiben, ist eine der Kernstärken von DataMesh der Aufbau eines „ausführbaren digitalen Zwillings“ mit Geschäftssimulationsfunktionen. Auf der digitalen Zwillingsplattform von DataMesh, FactVerse, ist die Industriewelt kein statisches Modell – es ist eine Umgebung, die wie ein autonomer Fahrsimulator „laufen“ kann: Objekte können sich bewegen, Prozesse können sich entwickeln, Ereignisse können ausgelöst und Logik ausgeführt werden. Diese dynamische Simulationsfunktion ermöglicht es DataMesh Robotics, Trainingsdaten zu generieren, die reale industrielle Betriebsmuster besser widerspiegeln und eine klarere, stabilere Grundlage für die Definition von Belohnungen für komplexe industrielle Aufgaben bieten.
DataMesh wurde zuvor von Gartner® in mehreren Forschungsberichten zur intelligenten Simulation gewürdigt und dort als Tech Innovator und Sample Vendor aufgeführt. Diese Anerkennung spiegelt die nachhaltige Investition und die gesammelten Fähigkeiten von DataMesh in intelligente Simulations- und räumliche digitale Zwillingstechnologien wider.
DataMesh Robotics ist so konzipiert, dass es mit gängigen Robotersimulations- und Trainingsökosystemen kompatibel ist. Es unterstützt den Export industrieller digitaler Zwillingsressourcen und -daten in Simulations- und Schulungsumgebungen, einschließlich NVIDIA Isaac Sim / Omniverse, und kann in die bestehenden Robotik-F&E- und Lieferabläufe von Unternehmen integriert werden. DataMesh Robotics hat die Prototypenvalidierung abgeschlossen und arbeitet mit Unternehmenspartnern – darunter Telekommunikationsbetreiber und Datenkennzeichnungsanbieter – an Pilotprojekten und gemeinsamen Erkundungen zusammen.
Highlights auf einen Blick
- Ausführbarer industrieller digitaler Zwilling (dynamische Geschäftssimulation): Szenen sind nicht nur statische Modelle, sondern ausführbare und entwicklungsfähige industrielle Betriebsumgebungen (Objekte/Prozesse/Ereignisse/Geschäftslogik können simuliert werden).
- Interaktive industrielle Betriebslogik: Unterstützt semantische Interaktionen auf Betriebsebene – z. B. Starten/Stoppen von Produktionslinien, Wechseln von Prozesszuständen und Auslösen von Ausnahmen oder Geschäftsregeln – um eine ausführbare Trainingsumgebung mit geschlossenem Regelkreis zu bilden.
- Skalierbare Produktion synthetischer Daten in Industriequalität: multimodale Datengenerierung + automatisierte Ground-Truth-Kennzeichnung zur Unterstützung von Wahrnehmung, Navigation, Manipulation und Auswertung.
- Training auch mit „nicht sichtbaren Daten“: Gibt Variablen wie Temperatur, Druck und Prozess-/Geschäftslogikzustände aus, um das Lernen und die Validierung für industrielle Aufgaben zu stärken.
- Belohnungsdesign für industrielle Aufgaben zur Behebung von Trainingsengpässen: Bietet Ziel-/Erfolgsbedingungs-/Belohnungssignaldesign und -bereitstellung für mehrstufige Aufgaben mit strengen Sicherheitsbeschränkungen, teilweiser Beobachtbarkeit und starker Branchensemantik.
- Low-Code-Editor für die Trainingskonfiguration: Konfiguriert Aufgabenziele, Belohnungsstrategien, Einschränkungen und Trainings-/Wahrnehmungsparameter (z. B. Sensorrauschen, Modelle und Algorithmen), ohne den zugrunde liegenden Code zu ändern, wodurch die Hürde für industriell verkörpertes KI-Training und -Validierung gesenkt wird.
- Kompatibilität mit Mainstream-Ökosystemen und Unternehmensbereitstellung: Verbindet sich mit Isaac Sim / Omniverse, unterstützt lokale/private Cloud/Hybrid-Cloud und Governance auf Unternehmensniveau.
Warum DataMesh Robotik: Was der industriellen verkörperten KI wirklich fehlt, ist „eine Welt, die sich verändert“
In industriellen Umgebungen besteht die Datenherausforderung nicht nur in „hohen Kosten für die Erfassung und Kennzeichnung“, sondern auch in der Tatsache, dass industrielle Aufgaben oft in einer Welt stattfinden, die von Prozessen im Laufe der Zeit bestimmt und durch viele Ereignisse ausgelöst wird. Roboter müssen nicht nur lernen, Objekte zu erkennen, sondern auch eine Reihe eingeschränkter Aktionen auszuführen: Warten – Ausgeben – Andocken – Bedienen – Überprüfen – Beenden … Diese Aufgaben hängen grundsätzlich von einer dynamischen Umgebung ab.
Viele digitale Zwillingslösungen auf dem Markt orientieren sich an „statischen 3D + Echtzeit-Datenüberlagerungen“ als Visualisierung: einfach anzuzeigen und zu demonstrieren, aber schwer „auszuführen“. Der digitale Zwilling von DataMesh legt Wert auf die Ausführbarkeit:
- Objekte können sich bewegen: Geräte, Türen/Schränke, Paletten, Fahrzeuge, Personal, Logistikeinheiten usw. können an dynamischen Veränderungen teilnehmen.
- Prozesse können sich weiterentwickeln: Fertigungs-, Betriebs-, Inspektions-, Reparatur- und Wartungsabläufe können gemäß Regeln voranschreiten.
- Ereignisse können ausgelöst werden: Alarme, Arbeitsaufträge, Änderungen des Gerätezustands, Schrittabschluss/-fehler und mehr können simuliert werden.
- Logik kann Folgendes ausführen: Geschäftsregeln und Verhaltensbäume (Geschäftslogik/Verhaltensbaum) steuern Umgebungsänderungen und Aufgabenbewertung.
Dies ermöglicht es DataMesh Robotics, innerhalb der Simulation eine „industrielle Welt im Betrieb“ aufzubauen, langfristige Betriebsbedingungen und komplexe Aufgaben unter Sicherheitseinschränkungen systematischer abzudecken und einen geschlossenen Kreislauf von der Datengenerierung bis hin zu Training und Auswertung zu bilden.
Was DataMesh Robotics leistet: End-to-End-Schulungsdaten und Aufgabendefinition basierend auf dynamischer Geschäftssimulation
DataMesh Robotics zielt auf den kritischen Pfad der Robotik-Forschung und -Entwicklung ab und bietet einen kombinierten Fähigkeitsstapel, der den Kreis von Szenen zu Daten und von Daten zu Schulungen schließt:
Modellierung industrieller Szenen
- Erstellen Sie industrietaugliche Umgebungen anhand von CAD/BIM, Anlagenstrukturen, Anlagenmodellen und Einschränkungen vor Ort.
- Versionierte Verwaltung von Szenen und Assets für Teamzusammenarbeit und reproduzierbare Experimente.
- Erstellen Sie mit Unternehmenssimulationen „Szenen, die sich verändern“: Layouts sind nicht nur sichtbar, sondern auch ausführbar.
Dynamische Unternehmenssimulation
- Fördern Sie die Szenenentwicklung im Laufe der Zeit mithilfe von Geschäftslogik und Verhaltensbäumen.
- Unterstützen Sie den Prozessfortschritt, das Auslösen von Ereignissen und Interaktionen mit mehreren Rollen und mehreren Objekten.
- Unterstützen Sie die Interaktion mit realer industrieller Betriebslogik, einschließlich Start/Stopp der Produktionslinie, Prozesszustandsübergängen und ausnahme- oder regelgesteuerten Ereignissen.
- Stellen Sie eine überprüfbare und wiederholbare Laufzeitumgebung für mehrstufige industrielle Aufgaben bereit. Die Aufrüstung des industriellen digitalen Zwillings von einer „statischen Szene“ zu einer „ausführbaren Umgebung“ ist die grundlegende Infrastruktur für das verkörperte KI-Training.
Physik & Materialien
- Definieren Sie physikalische Eigenschaften wie Masse, Reibung, Elastizität, Verbindungen und Einschränkungen.
- Unterstützen Sie Manipulationen und kontaktreiche Aufgaben: Greifen, Einsetzen/Zusammenbauen, Tür-/Schrank-Interaktionen, Andocken und mehr.
Multimodale Datengenerierung und automatisierte Ground Truth (Synthetic Data + Ground Truth)
- Generieren Sie fotorealistische visuelle Daten und multimodale Ausgaben (je nach Projekt konfigurierbar).
- Erstellen Sie automatisch konsistente und reproduzierbare Ground-Truth-Labels: Semantik-/Instanzsegmentierung, 2D-/3D-Begrenzungsrahmen, Instanz-IDs, Tiefenkarten, Schlüsselpunkte, Posen, Trajektorien und Szenenmetadaten.
- Geben Sie „nicht sichtbare Daten“ gleichzeitig aus: Temperatur, Druck, Prozess-/Geschäftslogikzustände und andere Variablen, um Modellen dabei zu helfen, Bedingungen und Einschränkungen zu erlernen, die realen Industrieabläufen näher kommen.
Industrielle Aufgabenziele und Belohnungskonfiguration
- In Industrieszenarien ist die Definition von Belohnungszielen oft schwieriger als der Aufbau des Simulators: strenge Toleranzen, mehrstufige Arbeitsabläufe, Sicherheitsbeschränkungen, teilweise Beobachtbarkeit und starke Branchensemantik führen zu unklaren Zielen, spärlichen Belohnungen und instabilem Training. DataMesh Robotics bietet einen konfigurationsgesteuerten Low-Code-Ansatz zur Definition industrieller Aufgabenziele und Belohnungsstrukturen:
- Branchensemantische Ziel- und Erfolgsbedingungsdefinitionen (Positionstoleranzen, Kontaktereignisse, Kraft-/Drehmomentschwellenwerte, Werkzeugeingriff, Metriken zum Abschluss der Inspektion usw.).
- Belohnungsgestaltung, Beendigungsbedingungen und Lehrplan-Lerndesigns zur Verbesserung der Trainingsstabilität und -effizienz.
- Versionierte Verknüpfung zwischen Belohnungen und Szenen-/Aufgabenvariationen für Reproduzierbarkeit, Debugging und kontrollierte Vergleiche.
- Bereitstellungsformate, die auf zielorientierte Schulungsrahmen (Konfigurationen, Skripte, Umgebungspaketierung usw.) abgestimmt sind, um die Integration in bestehende Schulungspipelines zu erleichtern.
Integration mit gängigen Simulations- und Trainingsökosystemen
DataMesh Robotics ist für die Zusammenarbeit mit modernen Robotik-Stacks konzipiert und unterstützt den Export von Szenen, Assets und Daten in nachgelagerte Trainings- und Simulationsumgebungen (einschließlich NVIDIA Isaac Sim / Omniverse / Cosmos / MuJoCo usw.).
Zuerst industriell, dann universell
DataMesh Robotics bedient derzeit hauptsächlich:
- Roboter-OEMs (Roboterhersteller): müssen schnell Daten- und Validierungssysteme für industrielle Einsatzaufgaben einrichten.
- Robotik-Anwendungs-/Agententeams: Sie müssen Strategien für bestimmte Kundenstandorte schnell iterieren, Long-Tail-Bedingungen abdecken und die Lieferstabilität verbessern.
Zu den typischen Richtungen gehören der Betrieb und die Montage von Industriearbeitsplätzen, die Navigation und Vermeidung von Hindernissen in Lagern/Fabrik, Inspektion und Wartung von Anlagen, Übungen für gefährliche/eingeschränkte Umgebungen sowie die kollaborative Aufgabenmodellierung und -bewertung mit mehreren Robotern.
Offene Piloten
DataMesh Robotics hat die Prototypenvalidierung abgeschlossen und arbeitet mit Unternehmenspartnern – darunter Telekommunikationsbetreiber und Datenkennzeichnungsanbieter – an Piloten und Sondierungsinitiativen zusammen. Als nächstes wird DataMesh seine Industrieanlagenbibliothek und Aufgabenvorlagen weiter ausbauen, dynamische Geschäftssimulationsfunktionen vertiefen und wiederverwenden und die Kompatibilität und Ergebnisse in allen gängigen Simulations- und Schulungsökosystemen weiter verbessern.
Jie Li, CEO von DataMesh, erklärte: „Wenn verkörperte KI in industrielle Umgebungen eindringt, besteht eine der größten Herausforderungen darin, dass sich die Trainingswelt wie die reale Welt verändern muss. Wir stellen nicht nur industrietaugliche Szenen und synthetische Daten bereit, sondern auch ausführbare Geschäftssimulationen, damit sich die Umgebung mit Prozessen und Ereignissen weiterentwickeln kann. Auf dieser Grundlage machen wir Belohnungsziele klar und führen die gesamte Trainingsschleife durchgängig durch. DataMesh Robotics möchte die industrielle Trainingsumgebung und Datenmaschine für Robotikteams werden – und das hilft.“ Kunden iterieren und implementieren schneller, sicherer und mit größerer Kontrolle.“
Wie man zusammenarbeitet
DataMesh Robotics ist jetzt offen für Pilotkooperationen und gemeinsame Lösungsentwicklung mit Roboter-OEMs und Anwendungsteams. Kontakt-E-Mail: robotics@datamesh.com
Über DataMesh
DataMesh ist ein Anbieter digitaler Zwillinge und räumlicher Intelligenztechnologie für Industrie- und Facility-Management-Szenarien. Der Schwerpunkt liegt seit langem auf wichtigen Geschäftsprozessen wie Planung, Überwachung, Schulung sowie Reparatur und Wartung. Basierend auf der DataMesh FactVerse-Plattform setzt sich DataMesh dafür ein, die betriebliche Effizienz und Sicherheit an vorderster Front durch reproduzierbare digitale Funktionen zu verbessern. DataMesh Robotics ist eine von DataMesh für das Zeitalter der verkörperten KI eingeführte Datenproduktlösung mit dem Ziel, industrietaugliche Szenarien, Daten und Aufgabendefinitionsfunktionen für Robotiktraining und -bewertung bereitzustellen – basierend auf einem ausführbaren industriellen digitalen Zwilling.
Medienkontakt
Marken- und Medienpartnerschaften: pr@datamesh.com Produkt- und Lösungsanfragen: robotics@datamesh.com
NVIDIA, Omniverse, Isaac und Cosmos sind Marken oder eingetragene Marken der NVIDIA Corporation. DataMesh Robotics ist eine unabhängige Lösung, die Kompatibilität und Integration mit verwandten Ökosystemen ermöglichen soll.